2.1 Proyecciones
2.1.1 Sistemas de coordenadas
2.1.2 Reproyecciones
2.1.3 Análisis espacial
2.2 Redes
2.2.1 Descripciones de líneas y distancias
2.2.2 Análisis de proximidad y accesibilidad
2.3 Superposición de mapas
2.3.1 Polígonos
2.3.2 Generación de áreas de influencia
2.4 Cartografía Automatizada
2.4.1 Fuentes cartográficas
2.4.2 Fotografía aérea
2.4.3 Imágenes satelitales
2.1 Proyecciones
La proyección es un componente fundamental a la hora de crear un mapa. Una proyección matemática es la manera de transferir información desde un modelo de la Tierra, el cual representa una superficie curva en tres dimensiones, a otro de dos dimensiones como es el papel o la pantalla de un ordenador. Para ello se utilizan diferentes proyecciones cartográficas según el tipo de mapa que se desea crear, ya que existen determinadas proyecciones que se adaptan mejor a unos usos concretos que a otros. Por ejemplo, una proyección que representa con exactitud la forma de los continentes distorsiona, por el contrario, sus tamaños relativos.
Dado que gran parte de la información en un SIG proviene de cartografía ya existente, un Sistema de Información Geográfica utiliza la potencia de procesamiento de la computadora para transformar la información digital, obtenida de fuentes con diferentes proyecciones y/o diferentes sistemas de coordenadas, a una proyección y sistema de coordenadas común. En el caso de las imágenes (ortofotos, imágenes de satélite, etc.) este proceso se denomina rectificación.

2.1.1 Sistemas de coordenadas
Un sistema de coordenadas permite "etiquetar" los puntos de una variedad diferenciable mediante un conjunto de n-tuplas. Los casos más sencillos de sistemas de coordenadas se definen sobre el espacio euclídeo o "espacio plano", aunque también es posible construirlos sobre variedades con curvatura. Un sistema de coordenadas sobre una variedad  n-dimensional se representa como un par ordenado
n-dimensional se representa como un par ordenado  formado por un dominio
formado por un dominio  y una aplicación diferenciable
y una aplicación diferenciable  a un conjunto abierto de
a un conjunto abierto de  , éste último conjunto contiene los posibles valores de las coordenadas, que obviamente serán números reales.
, éste último conjunto contiene los posibles valores de las coordenadas, que obviamente serán números reales.
n-dimensional se representa como un par ordenado formado por un dominio y una aplicación diferenciable a un conjunto abierto de , éste último conjunto contiene los posibles valores de las coordenadas, que obviamente serán números reales.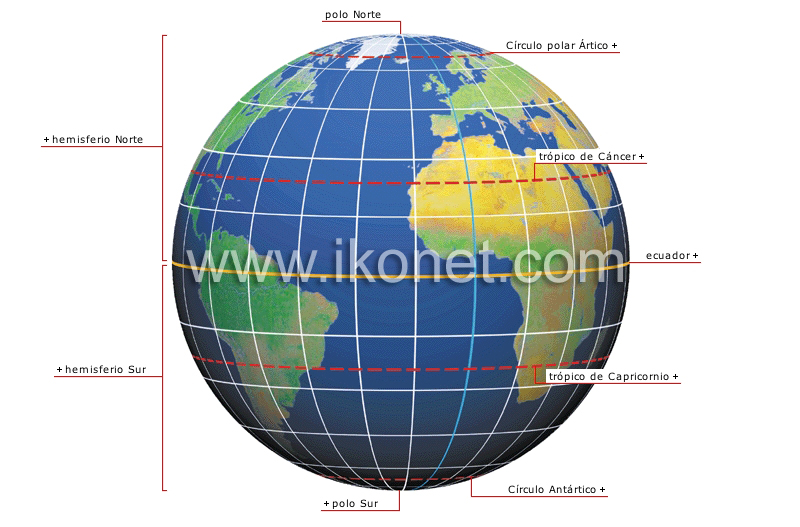
2.1.2 Reproyecciones
Dado que gran parte de la información en un SIG proviene de cartografía ya existente,
un Sistema de Información Geográfica utiliza la potencia de procesamiento de la
computadora para transformar la información digital, obtenida de fuentes con
diferentes proyecciones y/o diferentes sistemas de coordenadas, a una proyección y
sistema de coordenadas común. En el caso de las imágenes (orto fotos, imágenes de
satélite, etc.) este proceso se denomina rectificación.

2.1.3 Análisis espacial
Dada la amplia gama de técnicas de análisis espacial que se han desarrollado durante el último medio siglo, cualquier resumen o revisión sólo puede cubrir el tema a una profundidad limitada. Este es un campo que cambia rápidamente y los paquetes de software SIG incluyen cada vez más herramientas de análisis, ya sea en las versiones estándar o como extensiones opcionales de este. En muchos casos tales herramientas son proporcionadas por los proveedores del software original, mientras que en otros casos las implementaciones de estas nuevas funcionalidades se han desarrollado y son proporcionados por terceros. Además, muchos productos ofrecen kits de desarrollo de software (SDK), lenguajes de programación, lenguajes de scripting, etc. para el desarrollo de herramientas propias de análisis u otras funciones
2.2 Redes
Un SIG destinado al cálculo de rutas óptimas para servicios de emergencias es capaz de determinar el camino más corto entre dos puntos teniendo en cuenta tanto direcciones y sentidos de circulación como direcciones prohibidas, etc. evitando áreas impracticables. Un SIG para la gerencia de una red de abastecimiento de aguas sería capaz de determinar, por ejemplo, a cuantos abonados afectaría el corte del servicio en un determinado punto de la red.
Un Sistema de Información Geográfica puede simular flujos a lo largo de una red lineal. Valores como la pendiente, el límite de velocidad, niveles de servicio, etc. pueden ser incorporados al modelo con el fin de obtener una mayor precisión. El uso de SIG para el modelado de redes suele ser comúnmente empleado en la planificación del transporte, hidrológica o la gestión de infraestructura lineales.

2.2.1 Descripciones de líneas y distancias
Las descripciones de línea se crean para describir la conexión de la línea física y el protocolo de enlace de datos que se utilizará entre el sistema y la red
la distancia es el trayecto espacial o el periodo temporal que separa dos acontecimientos o cosas. Se trata de la proximidad o lejanía que existe entre objetos o eventos
2.2.2 Análisis de proximidad y accesibilidad
El análisis de proximidad, considerado como una herramienta dentro de los SIG, consta de de 3 grandes rasgos: como los son los Buffer, referidos a áreas que rodean una figura, donde este se pude constituir por varias áreas concéntricas o anillos. Por otro lado existen los mapas de distancias y mapas de proximidad, donde el primero se refiere a la distancia a cada objeto, y el segundo a la asignación de parte del territorio su objeto más cercano (Franco, R., 2001).El análisis de proximidad pueden ser aplicados en distintas áreas dependiendo de lo que se quiera repre sentar, donde estas representaciones espaciales se pueden realizar en forma cartográfica y lo que se quiere dar a conocer será mediante las proximidades entre objetos y el análisis de estructuras a través de esta representación (Schiffman et al., 1981), por lo tanto lo que se quiere demostrar es la relación que existe y la influencia que genera este.

2.3 Superposición de mapas
La combinación de varios conjuntos de datos espaciales (puntos, líneas o polígonos) puede crear otro nuevo conjunto de datos vectoriales. Visualmente sería similar al apilamiento de varios mapas de una misma región. Estas superposiciones son similares a las superposiciones matemáticas del diagrama de Venn . Una unión de capas superpuestas combina las características geográficas y las tablas de atributos de todas ellas en una nueva capa. En el caso de realizar una intersección de capas esta definiría la zona en las que ambas se superponen, y el resultado mantiene el conjunto de atributos para cada una de las regiones. En el caso de una superposición de diferencia simétrica se define un área resultante que incluye la superficie total de ambas capas a excepción de la zona de intersección.
En el análisis de datos raster, la superposición de conjunto de datos se lleva a cabo mediante un proceso conocido como álgebra de mapas, a través de una función que combina los valores de cada matriz raster. En el álgebra de mapas es posible ponderar en mayor o menor medida determinadas coberturas mediante un "modelo índice" que refleje el grado de influencia de diversos factores en unfenómeno geográfico.

2.3.1 Polígonos

2.3.2 Generación de áreas de influencia
La
generación de áreas de influencia (buffering) implica la creación de una
zona alrededor de un punto, línea o polígono, de un ancho especificado. El
resultado de esta operación es un nuevo polígono, que se puede utilizar para
resolver cuestiones como la de definir qué entidades se encuentran dentro o
fuera del área de influencia especificada. (Burrough & McDonnell, 1998, p
299).
El buffering también se puede definir como el equivalente
vectorial del análisis de distancias en estructuras raster.
Áreas
de Influencia de datos puntuales
Con frecuencia las operaciones SIG requieren la
generación de áreas de influencia (buffering) en ciertos análisis. La
forma más simple de área de inflluencia es la que se genera en torno a datos
puntuales ya que el proceso implica tan solo la creación de un polígono
“circular” en torno a cada punto, de radio equivalente a la distancia del
corredor o buffer. Hay dos formas de asignar la anchura del área de influencia
(o distancia del buffer). La primera (y más simple) aplica una distancia
de buffer fija para todos los puntos de una capa; este valor lo especifica el
usuario. La segundo asigna a cada punto un valor de anchura individual basado
en los atributos de otra capa del sistema (p.ej.: la ponderación o peso). Los
atributos de anchura del área de influencia están presentes en la tabla de
atributos (como en el ejemplo), o en una Look Up Table.
En el caso de existir múltiples puntos en la capa que va
a ser analizada, el sistema debe comprobar la existencia de solapamientos entre
las áreas de influencia de cada punto. Estas deben ser borradas –de forma que
el resultado sea una capa poligonal que represente la zona cubierta por la
unión de todas las áreas de influencia. Este procedimiento implica la
aplicación de dos operaciones adicionales: la intersección y la disolución (dissolve).
La
creación de áreas de influencia da como resultado una nueva capa de tipo
poligonal en el sistema, que representa las zonas de influencia generadas a
partir de valores de distancia tanto fijos como ponderados. La tabla de
polígonos resultante contendrá los identificadores de los polígonos creados en
el procedimiento, y un nuevo atributo que indica si el polígono se encuentra
dentro o fuera del área de influencia.
Áreas
de Influencia de datos lineales
Con
frecuencia las operaciones SIG requieren la generación de áreas de influencia
(buffering) en ciertos análisis.
El
algoritmo en el caso de datos de tipo lineal es más complejo que el de datos
puntuales, ya que las líneas se pueden componer de múltiples segmentos. El
proceso es de la siguiente forma:
- En primer lugar, a
cada segmento de línea se le asigna la anchura correspondiente del área de
influencia (la cual podría ser fija para todas las líneas o ponderada). A
esta distancia la denominaremos b.
- Cada
segmento de la línea tiene un nodo inicial (E1, N1) y un nodo final
(E2, N2). A partir de estas coordenadas se calculan los valores ∆x
y ∆y entre los dos extremos.
- Las
coordenadas de los puntos extremos de las líneas paralelas a crear a ambos
lados del segmento de línea, a una distancia perpendicular b, se
determinan con las fórmulas mostradas:
- Una vez que se han identificado las dos nuevas líneas paralelas de la futura área de influencia, se puede procesar de la misma manera el siguiente segmento.
- Una vez que se hayan
identificado las líneas paralelas al siguiente segmento, se calculan las
intersecciones entre las líneas paralelas trazadas para cada segmento y se
asignan nuevas coordenadas a los vértices comunes. Aquí se puede utilizar
el análisis de intersección de líneas más simple – pues implica siempre la
existencia de una solución.
- Estos pasos se repiten
hasta que se procesa el último de los segmentos de la línea inicial.
- El
útlimo paso consiste en la definición de la forma de los extremos del área
de influencia. Los diferentes paquetes de SIG definen los extremos finales
de un área de influencia de forma diferente. Los métodos son:
1. Un sencillo truncamiento de los extremos finales de las
líneas paralelas.
2. Rematar en punta los extremos de las líneas paralelas
para hacerlos coincidir.
3. Rematar el punto de inicio y fin de las líneas paralelas
con un polígono en forma de semicírculo de radio b.
Si
existen varias líneas en la capa en la que se van a crear las áreas de
influencia, el sistema debe comprobar la existencia de solapamientos entre los
buffer de cada línea. Se deben borrar todas las regiones que solapan – de forma
que el resultado sea una capa poligonal que represente la zona cubierta por la
unión de todas las áreas de influencia. Este procedimiento implica la
aplicación de dos operaciones adicionales: la intersección y la disolución (dissolve).
La
creación de áreas de influencia da como resultado una nueva capa de tipo
poligonal en el sistema, que representa las zonas de influencia generadas a
partir de valores de distancia tanto fijos como ponderados. La tabla de
polígonos resultante tendrá los identificadores de los polígonos creados en el
procedimiento, y un nuevo atributo que indica si el polígono se encuentra
dentro o fuera del área de influencia.
Áreas
de Influencia de datos poligonales
Con
frecuencia las operaciones SIG requieren la generación de áreas de influencia
(buffering) en ciertos análisis. El algoritmo para la creación de áreas de influencia en
torno a polígonos utiliza el mismo proceso que en el caso del algoritmo para
datos lineales, con una pequeña diferencia – el polígono buffer resultante
se crea solo hacia uno de los lados que definen el polígono original (hacia
fuera o hacia dentro). Por defecto se genera el área de influencia alrededor de
los límites que definen el polígono – algunos software SIG ofrecen también la
posiblidad de crear el buffer hacia el interior del polígono problema. A continuación se
muestra un ejemplo de las posibles soluciones a la creación de un área de
influencia de un polígono.

2.4 Cartografía Automatizada
Tanto la cartografía digital como los Sistemas de Información Geográfica codifican relaciones espaciales en representaciones formales estructuradas. Los SIG son usados en la creación de cartografía digital como herramientas que permiten realizar un proceso automatizado o semiautomatizado de elaboración de mapas denominado cartografía automatizada.
En la práctica esto sería un subconjunto de los SIG que equivaldría a la fase de composición final del mapa, dado que en la mayoría de los casos no todos los software de Sistemas de Información Geográfica poseen esta funcionalidad.
El producto cartográfico final resultante puede estar tanto en formato digital como impreso. El uso conjunto que en determinados SIG se da de potentes técnicas de análisis espacial junto con una representación cartográfica profesional de los datos, hace que se puedan crear mapas de alta calidad en un corto período. La principal dificultad en cartografía automatizada es el utilizar un único conjunto de datos para producir varios productos según diferentes tipos de escalas, una técnica conocida como generalización.

2.4.1 Fuentes cartográficas
La adquisición de fuentes de información geográficas de calidad es uno de los requisitos principales a la hora de acometer un proyecto patrimonial de carácter territorial en el que el SIG es una de las herramientas clave. En la mayoría de las ocasiones, y cuando se está empezando en todo este mundo, las fuentes cartográficas que se manejan son las más cercanas (administración local, en el caso que se pueda acceder a ellas, y administración autonómica) por ser las más conocidas, utilizadas y fáciles de conseguir.

2.4.2 Fotografía aérea
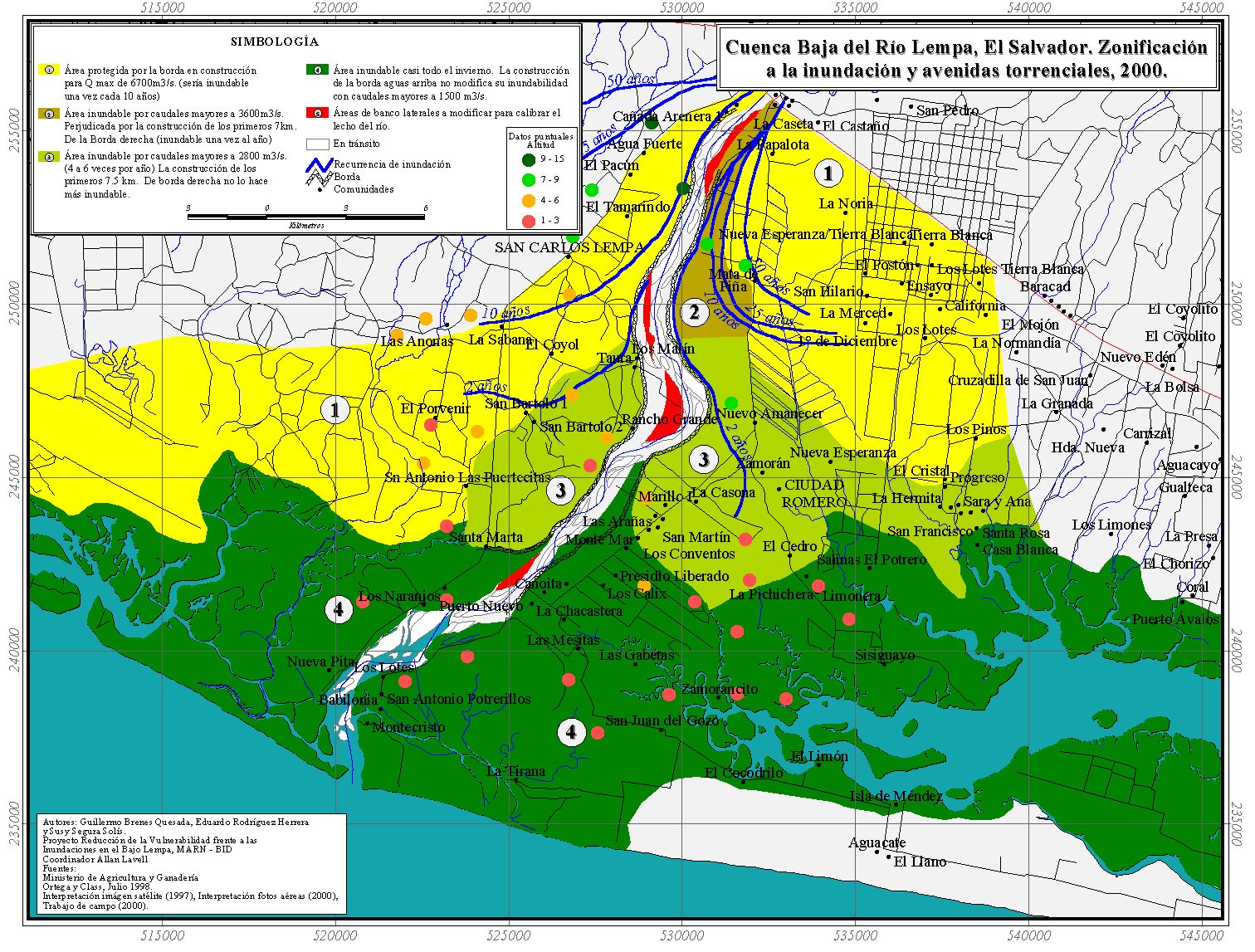
La fotografía aérea constituye uno de los insumos fundamentales para iniciar el proceso de elaboración de cartografía topográfica, catastral, de riesgos, de ordenamiento territorial y de otros temas relacionados con la disposición de información básica para el análisis del territorio.
La reproducción de fotografías aéreas se ofrece en medios digitales a partir de escaneo de negativos a una resolución de 18 micras, disponibles en formato .tif o .jpg.

2.4.3 Imágenes satelitales
Una imagen satelital o imagen de satélite se puede definir como la representación visual de la información capturada por un sensor montado en un satélite artificial. Estos sensores recogen información reflejada por la superficie de la tierra que luego es enviada a la Tierra y que procesada convenientemente entrega valiosa información sobre las características de la zona representada.
La primera imagen satelital de la tierra fue tomada el 14 de agosto de 1959 por el satélite estadounidense Explorer 6. La primera fotografía satelital de la luna fue tomada por el satélite soviéticoLuna 3 el 6 de octubre de 1959, en una misión para fotografiar el lado oculto de la Luna.La canica azul, fue tomada en el espacio en 1972, esta fotografía se volvió muy popular en los medios de comunicación y entre la gente. También en 1972 los Estados Unidos comenzaron con el programa Landsat, el mayor programa para la captura de imágenes de la tierra desde el espacio. El Landsat 7, el último satélite del programa, fue enviado al espacio en 1999.
En 1977, se obtiene la primera imagen satelital en tiempo real, mediante el satélite KH-11.
Todas las imágenes satelitales obtenidas por la NASA son publicadas por Observatorio de La Tierra de la NASA y están disponibles para el publico.

referencias bibliograficas
Accessing spatial data tutorial (2002), Geographic information and GIS:
What is a GIS; Software; Data; Data access; Metadata.
http:www.main.nc.us/GIS/guide.
Batty, M. (1992), Urban modeling in computer-graphic and geographic
information system environments. Environmental and Planning B: Planning and
Design 19:663-668.
Batty, M. y Y. Xie (1994), Modeling inside GIS: Part 1. Model structures,
exploratory spatial data analysis and aggregation. International Journal of
Geographic Information Systems 8(3) 291-307.
Blaszczynski, J. S. (1997), Landform characterization with geographic
information systems. Photogrammetric Engineering & Remote Sensing, 63(2)183-
191.
Bosque S. J y García R. C. (2000), El uso de los sistemas de información
geográfica en la planificación territorial. Anales de geografía de la universidad
Complutense, Madrid, España, No. 20:49-67.
Bullen, N., G. Moon y K. Jones (1996), Defining localities for health
planning: a GIS approach. Soc. Sci. Med. 42(6): 801-806.
Ceballos, G., P., Rodríguez y R. Medellín (1998), Assessing conservation
priorities in megadiverse Mexico: mammalian diversity, endemicity and
endangerment. Ecological applications. 8(1):8-17.
Cebrian de Miguel, J. A. y D. Martk (1986), Sistemas de información
geográfica. Funciones y estructuras de datos. Estudios Geográficos. Madrid,
184:277-299.
Chuvieco, Emilio (1996), Fundamentos de teledetección espacial. 3ra Ed.,
Ediciones RIALP, Madrid. pp. 504-510. Parte II: La Interpretación de los datos
(Teledetección y Sistemas de Información Geográfica).
Domínguez-Guerrero R. y S. Alvarado-López (1996), Utilidad de los SIG’s en
el análisis socioeconómico (el caso del municipio de Toluca). En: I Foro sobre
aplicaciones de los sistemas de información geográfica. pp. 3-6. Facultad de
Geografía, UAEM.
Eghenter C. (1999), Mapping peoples’ forest: the role of mapping in
planning community-based management of conservation areas. Biodiversity
Support Program. 39 p.
What is a GIS; Software; Data; Data access; Metadata.
http:www.main.nc.us/GIS/guide.
Batty, M. (1992), Urban modeling in computer-graphic and geographic
information system environments. Environmental and Planning B: Planning and
Design 19:663-668.
Batty, M. y Y. Xie (1994), Modeling inside GIS: Part 1. Model structures,
exploratory spatial data analysis and aggregation. International Journal of
Geographic Information Systems 8(3) 291-307.
Blaszczynski, J. S. (1997), Landform characterization with geographic
information systems. Photogrammetric Engineering & Remote Sensing, 63(2)183-
191.
Bosque S. J y García R. C. (2000), El uso de los sistemas de información
geográfica en la planificación territorial. Anales de geografía de la universidad
Complutense, Madrid, España, No. 20:49-67.
Bullen, N., G. Moon y K. Jones (1996), Defining localities for health
planning: a GIS approach. Soc. Sci. Med. 42(6): 801-806.
Ceballos, G., P., Rodríguez y R. Medellín (1998), Assessing conservation
priorities in megadiverse Mexico: mammalian diversity, endemicity and
endangerment. Ecological applications. 8(1):8-17.
Cebrian de Miguel, J. A. y D. Martk (1986), Sistemas de información
geográfica. Funciones y estructuras de datos. Estudios Geográficos. Madrid,
184:277-299.
Chuvieco, Emilio (1996), Fundamentos de teledetección espacial. 3ra Ed.,
Ediciones RIALP, Madrid. pp. 504-510. Parte II: La Interpretación de los datos
(Teledetección y Sistemas de Información Geográfica).
Domínguez-Guerrero R. y S. Alvarado-López (1996), Utilidad de los SIG’s en
el análisis socioeconómico (el caso del municipio de Toluca). En: I Foro sobre
aplicaciones de los sistemas de información geográfica. pp. 3-6. Facultad de
Geografía, UAEM.
Eghenter C. (1999), Mapping peoples’ forest: the role of mapping in
planning community-based management of conservation areas. Biodiversity
Support Program. 39 p.
No hay comentarios:
Publicar un comentario